Overview¶
Welcome to the Simulation Robotics documentation. This page includes index of a brief description of the variant sections of the documentation. Please, feel free to explore in any order as you wish.
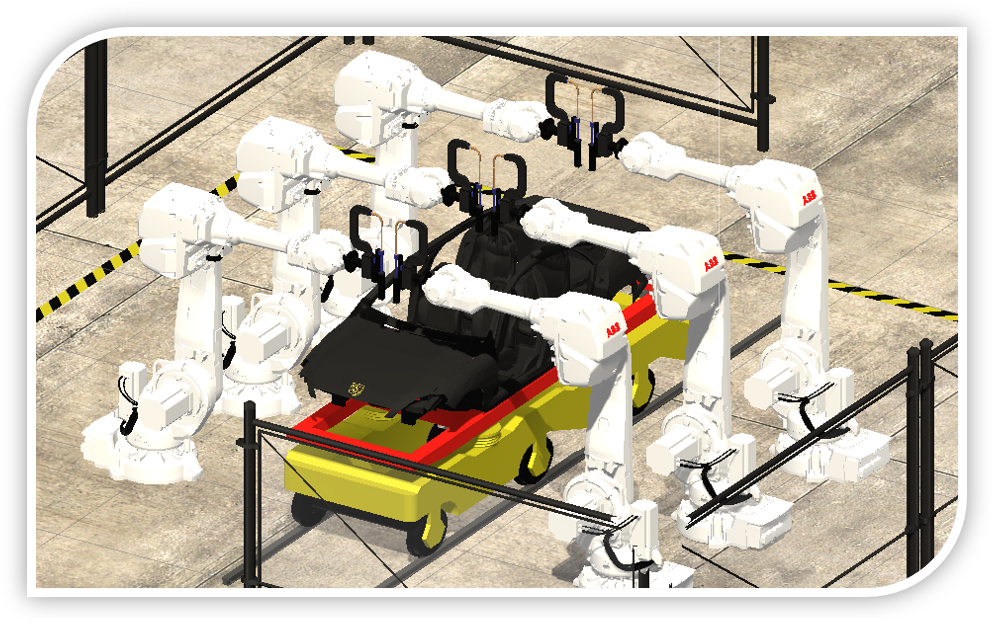
Dealing with industrial enviroment is always a challenge! Below you can find a link illustrating an industrial environment and check how operations are performed. I hope this will provide a better vision for designers and developers with consideration of more complex and realistic enviroment for testing their algorithm.
Important
- This documentation refers to the latest development versions of Simulation Robotics, 0.1.
Further development versions will be relased and documented in (`Here<https://simulbotics.com/versions>`__)
Below you can also observe the Tesla Factory line in a lower video motion, in here the car assembly line from inserting the metal sheet to final car delivery is also illustrated. The benefit of this is that the engineers can obtain a better grasp of industrial enviroment, robot manipulators tools and so forth.
__Install Simulation Robotics.__ follow the [Quick start](quick_start.rst) to run the simulation for a desired platform.
__Check the Architecture.__ there is a guide reference to [Simulation Robotics Architecture](Architecture.rst) which you can check a closer look.
— ## Getting started [__Introduction__](introduction.rst) — What to expect from Simulation Robotics. [__Quick start__](quick_start.rst) — Work with a quick release. [__Architecture__](Architecture.rst) — Get a closer look into simulation robotics achitecture.