Publications¶
This section is designated to publications, data, performance and results.
RSS 2021¶
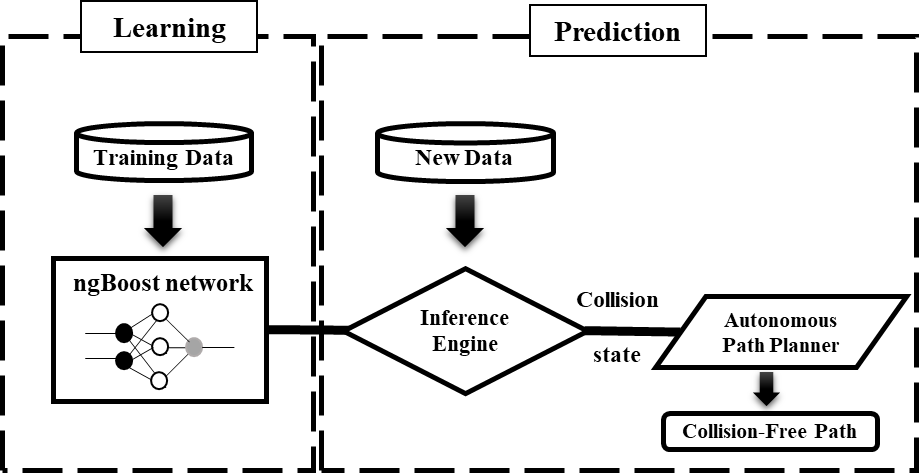
In this publication, we studied the prediction performance of natrual gradient boosting networks in predicting the collision of UR5 robot and its enviroment.
We have utlized the same data and case study for the UR5 robot in the Fusion 2021 publication but with a different model. Our extended abstract is accesible in the following link or directly from See paper!
https://sites.google.com/view/geotopo-rss2021/accepted-contributions?authuser=1
The correspoding data file for collision states is accesible through following link. See UR5-300K data sample.
It is also possible to access the prediction model file. See ngBoost prediction model. If working with python, you are able to load the model using import pickle package.
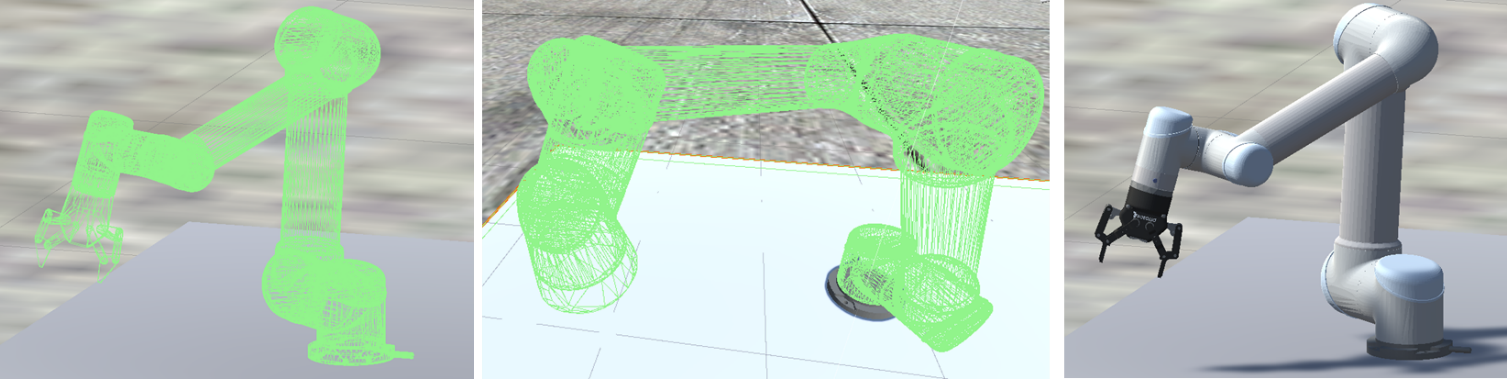
A main delay contributor in the collision checking process is the geometrical assumption and the degree of the objects’ description. Generally, the CAD models describe the complexity of the description and consequently the computation. In fact, the number of edges and triangles describing the collision geometry and the requirement for updating these vertices and triangles with each change in the environment. This is also valid for robot collision geometry. The below figure illustrates a simplified collision mesh describing a UR5 robot that we simplify the collision checking behavior with a learning model.
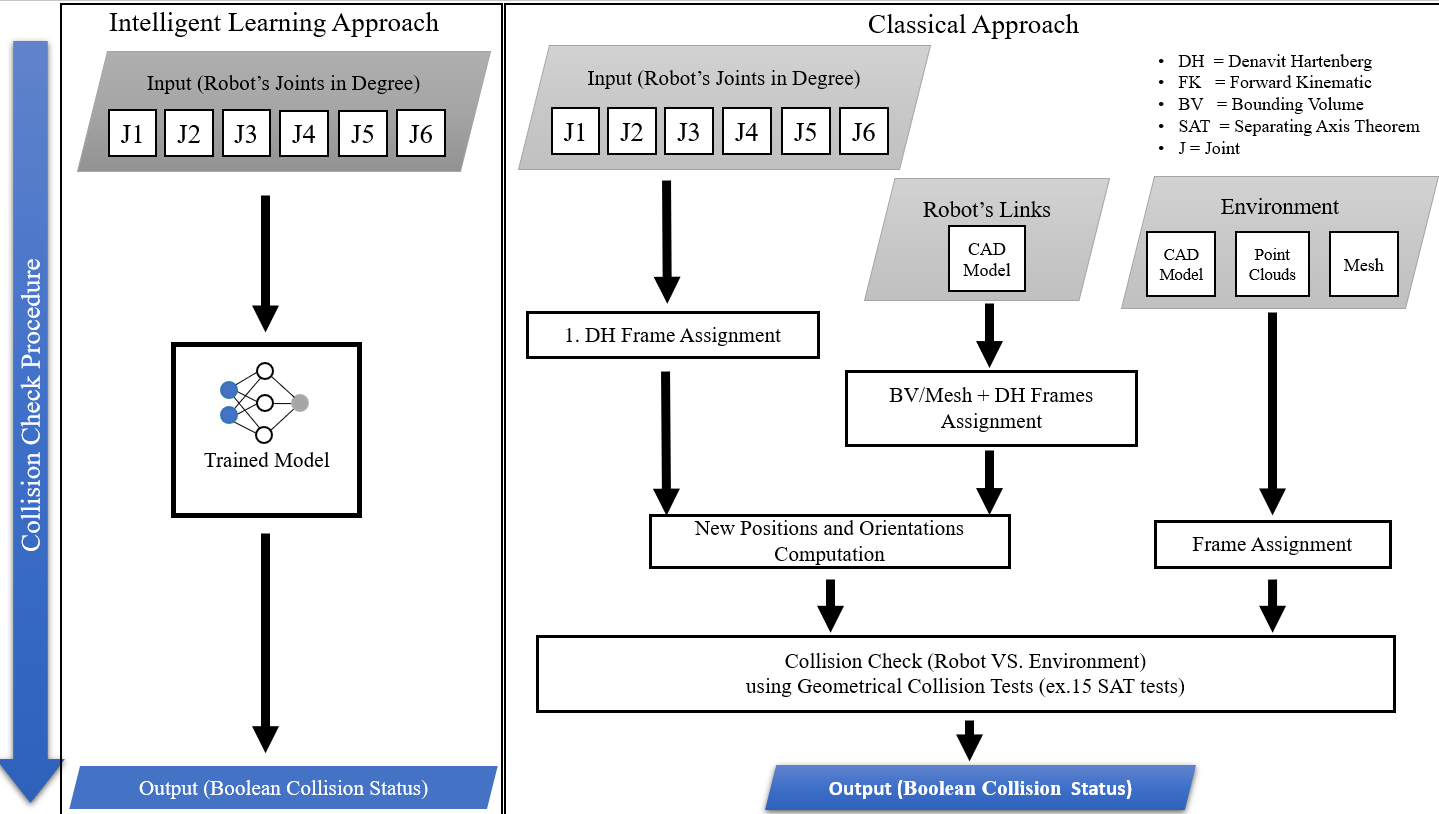
In following chart we compare the exact process happening in the collision checking process.
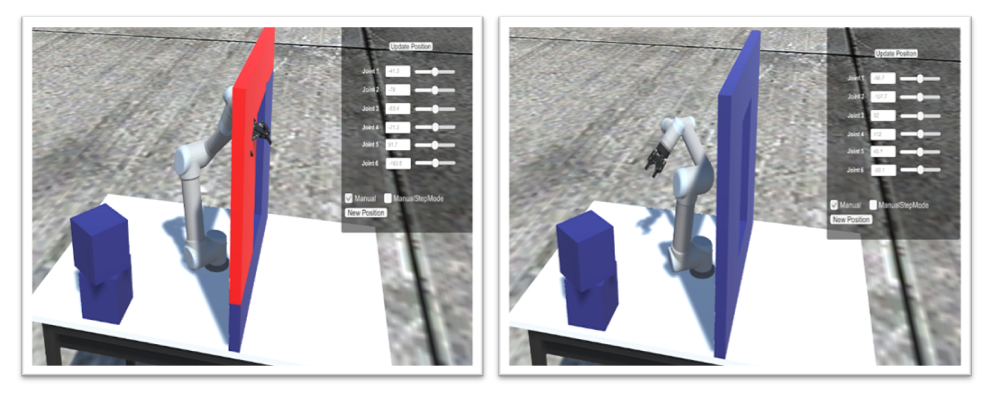
In the below video, we illustrated the collision data collection process for training, validation and testing purpose. We utilzed the random joints configurations to estimate the collision map of the environment.
As illustrated in the above video, a key computation delay contributor is the geometries assumed for the robot. The higher precision of the
Natrual Gradient Boosting Technique¶
Gradient boosting method is a technique for regression, classification and other tasks. This technique predicts in form of an ensemble prediction models such as decision trees. You can access the correspoinding article from the following link. https://stanfordmlgroup.github.io/projects/ngboost/
CASE 2022¶
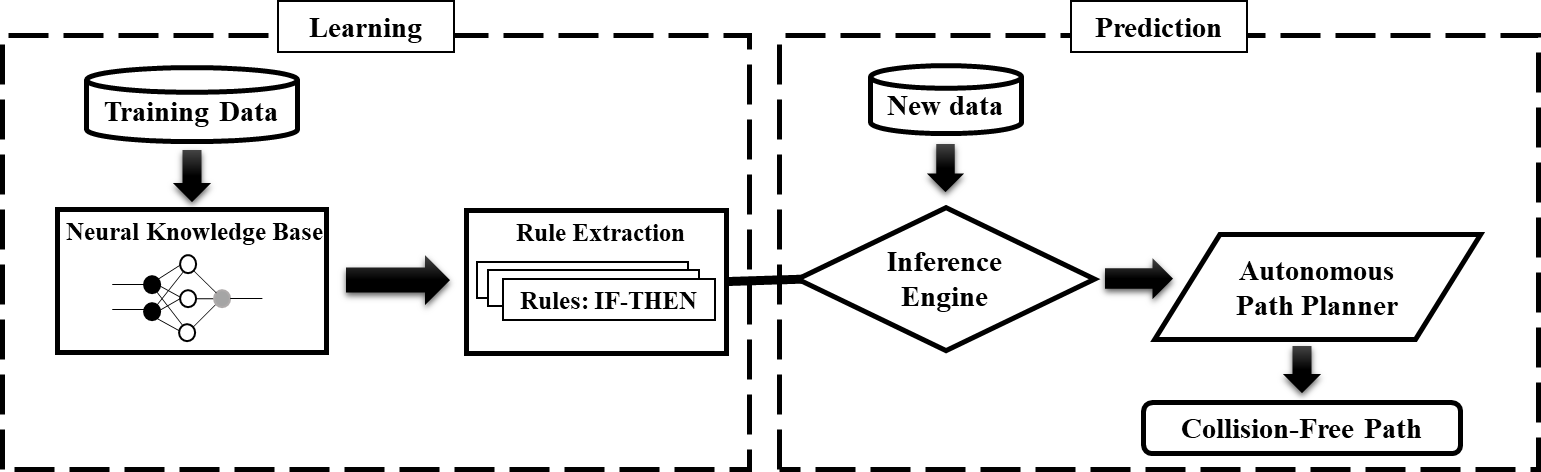
In this publication, we studied the application of ruled-based networks in predicting the collision detection of a UR5 robot. The codes and models will be available for the validation and further research for the OpenAccess movement.
Ruled Based Network¶
Ruled Based Netowrk is a machine learning algorithm built on top of scikit-learn. It learns logical, interpretable rules that detects high precision classes. It benefits from trade off between the interpretability of a Decision Tree and the modelization power of a Random Forest.